Research Projects
Advancing digital agriculture through imaging, robotics, and AI.

Nursery Inventory Robot
AI-powered vision-based seedling counting and quality assessment for forest nursery.
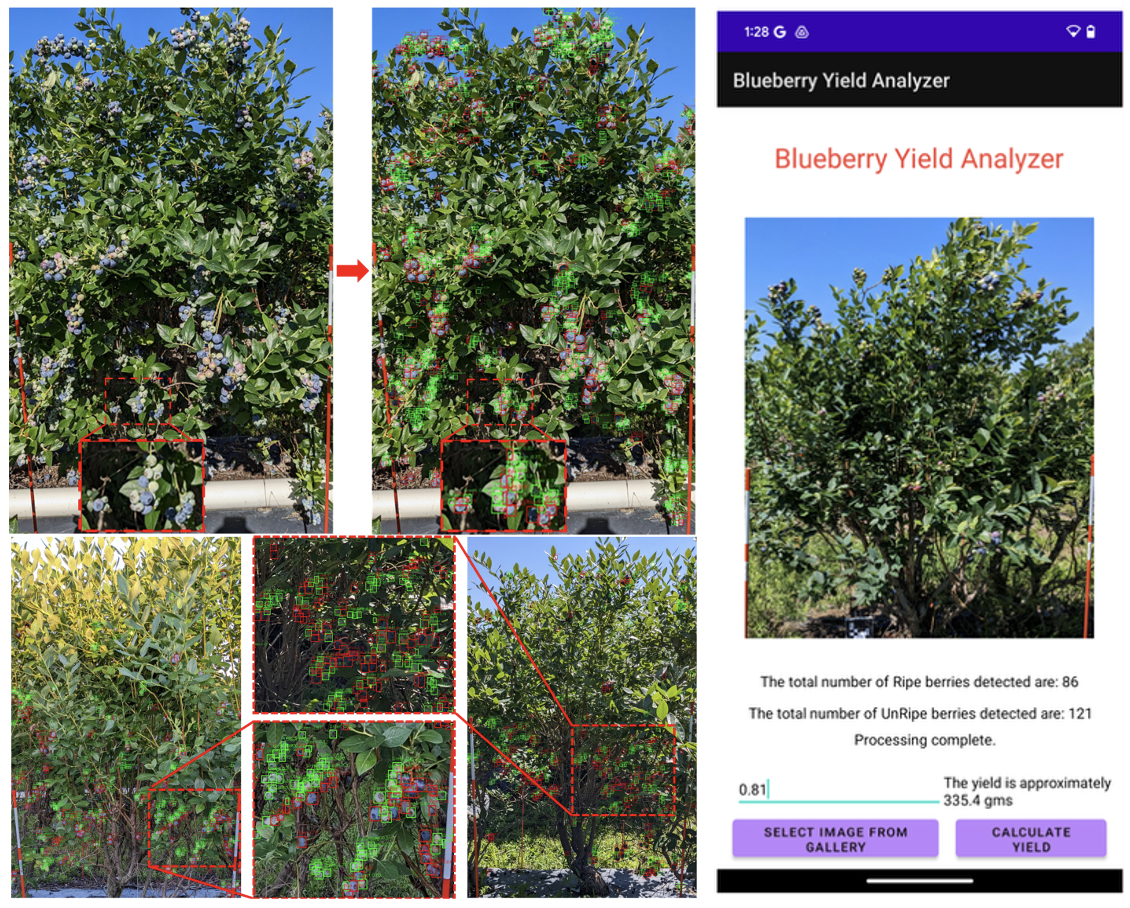
Blueberry Yield Prediction
Smartphone app to detect ripe berries and predict yield.
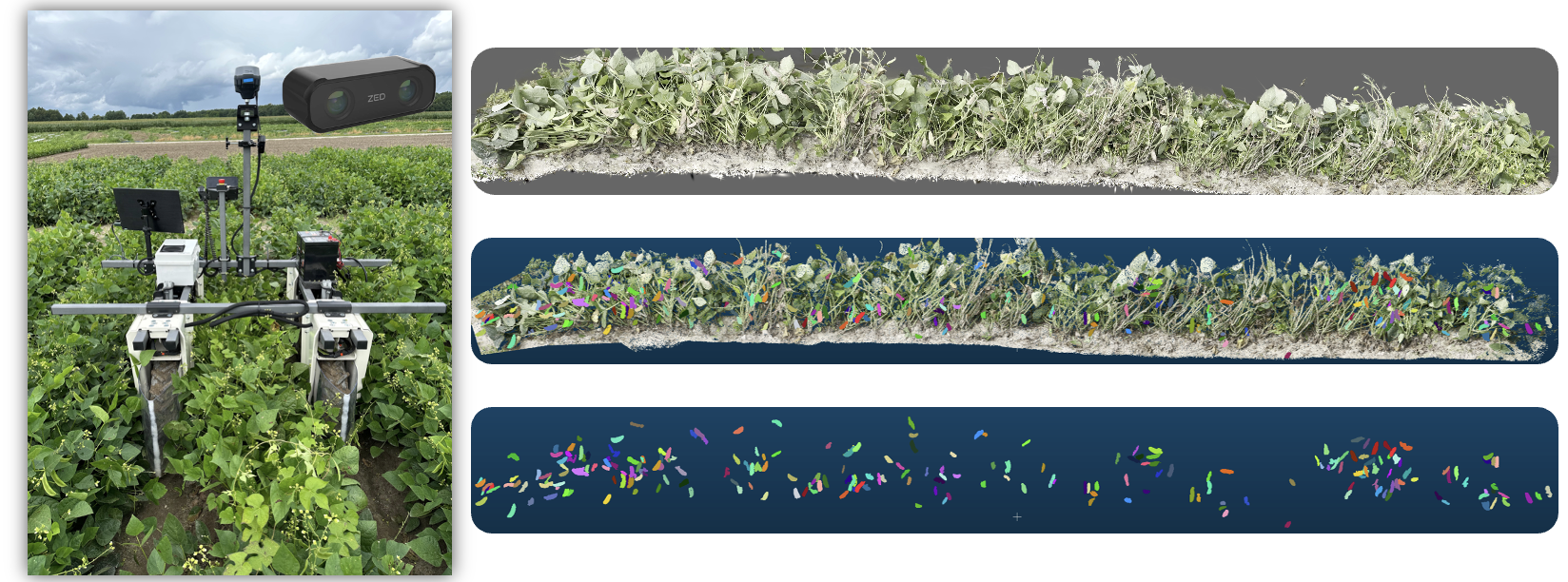
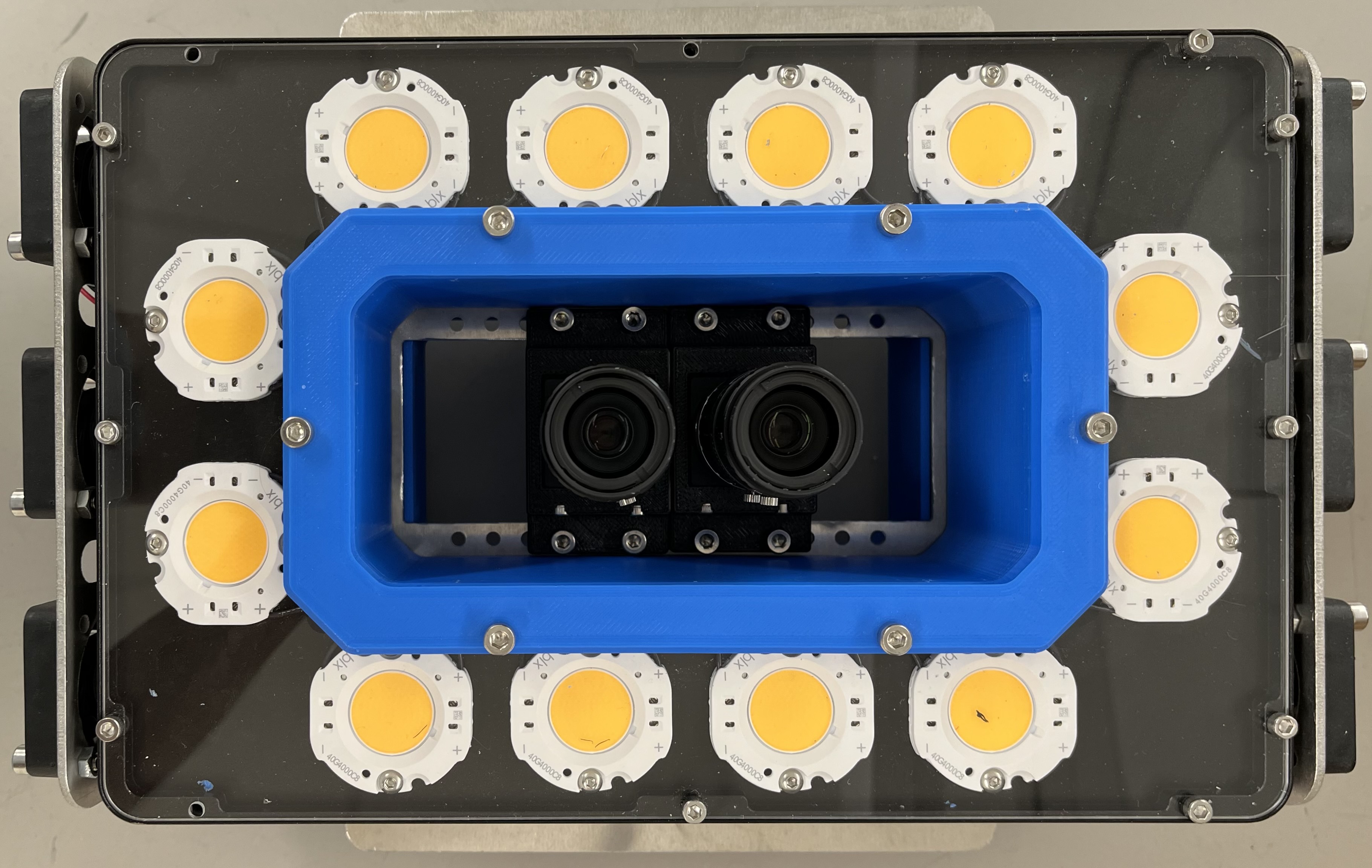
Plant Architecture Phenotyping
Automate lima bean pod counting using robotic multi-view imaging, 3D Gaussian Splatting, and Segment Anything Model.

Crop Remote Sensing
Aerial phenotyping of morphology and physiology using drone-based hyperspectral imaging and LiDAR.